Kickstarter: Phenox
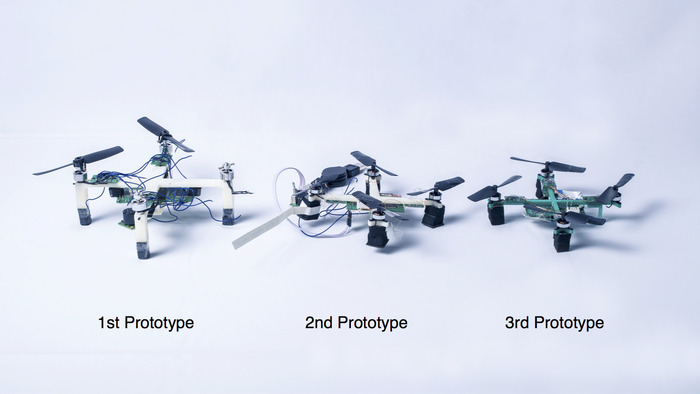
1st Prototype: Success in flight at the end of 2012. Micro-controller (cortex-M4) , FPGA(Spatran-6) and DDRSDRAM(64MB), IMUs, a monocular camera and 4-inch propeller. 120g.
2nd Prototype: Self-position estimation system using a monocular camera. Very small brushless motor and its control system. 100 grams. The study of its self-position estimation and fully autonomous hovering on-board using this prototype will be reported in the international conference *2.
3rd Prototype: ZYNQ-7000 Soc and DDR3 on the compact designed circuit board. Booting linux program from 4GB micro SD card. Two cameras used for self-position estimation and acquisition of raw images on-board. Two separate batteries. 80grams.

4th (current) prototype: Cables and separated circuit board are united to one main circuit board system. Miscellaneous hardware and software bugs have been fixed. One battery. Down to 65grams.
*2 Ryo Konomura and Koichi Hori,"Visual 3D Self Localization with 8 Gram Circuit Board for Very Compact and Fully Autonomous Unmanned Aerial Vehicles", 2014 IEEE International Conference on Robotics and Automation, May 31 - June 5, 2014 (will appear)
If you're interested in backing this project, visit their Kickstarter.
Comments